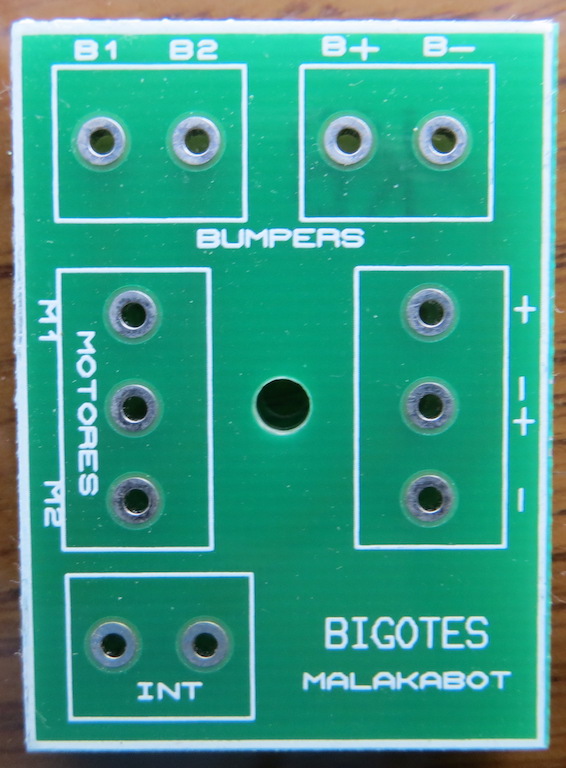
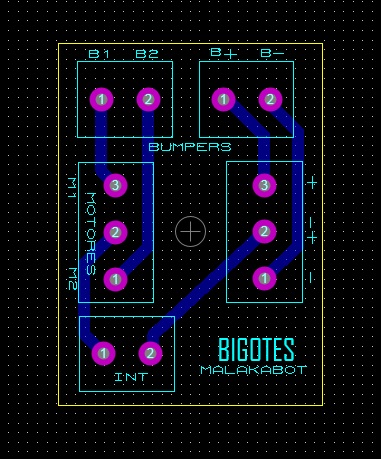
La electrónica de este robot está copiada de un diseño del profesor de Tecnología José Andrés Alcaraz.
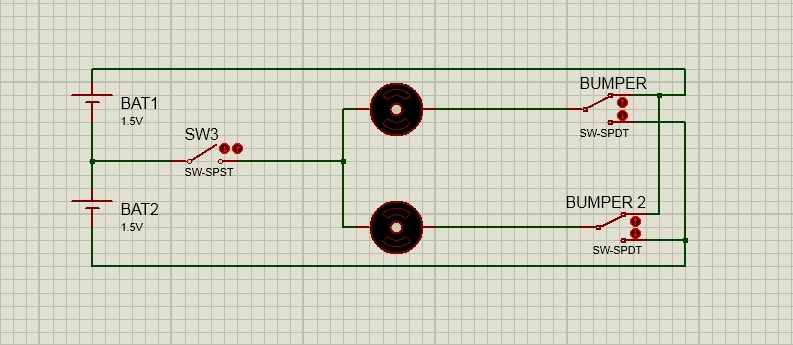
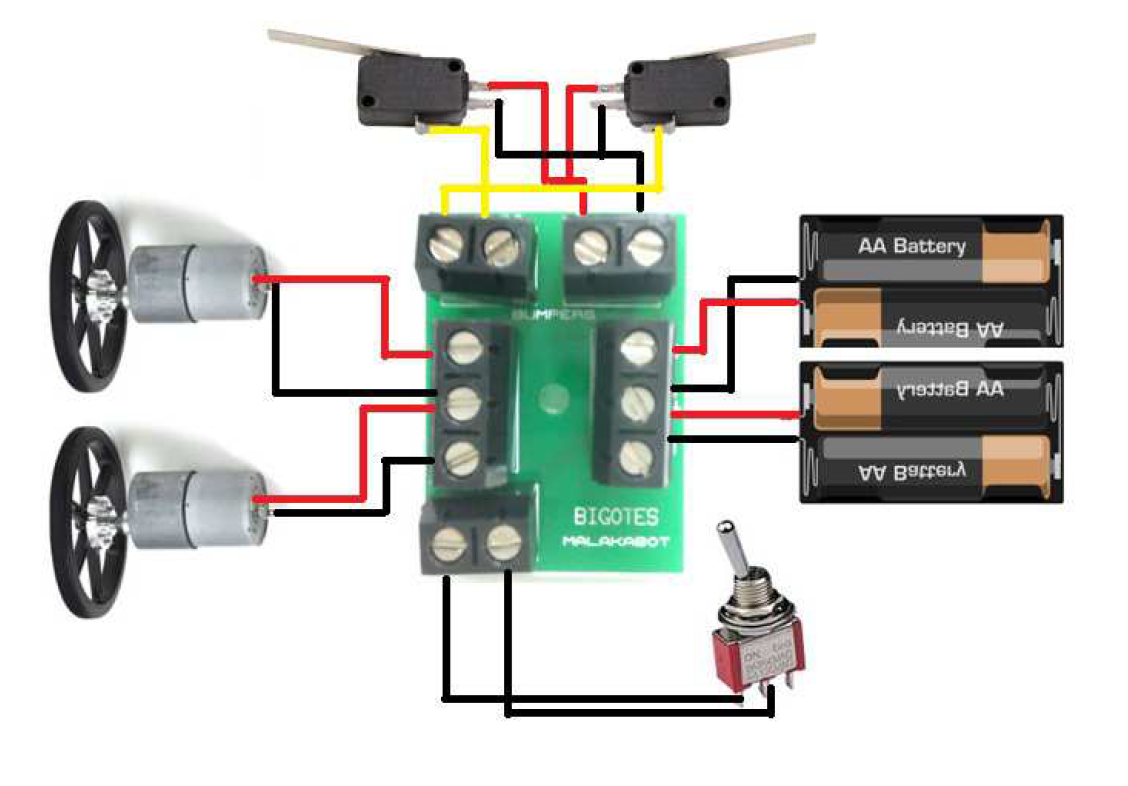
El objetivo del robot es que vaya sorteando obstáculos. Para ello usamos dos finales de carrera (bumpers) y dos motores. La idea es muy simple, los motores se mueven hacia delante, en el mismo sentido, mientras los bumpers no estén pulsados. Si por ejemplo, el bumper de la izquierda choca con algún objeto, quedaría pulsado el interruptor, y cambiaría la polaridad del motor de la derecha, girando hacia atrás, en sentido contrario.