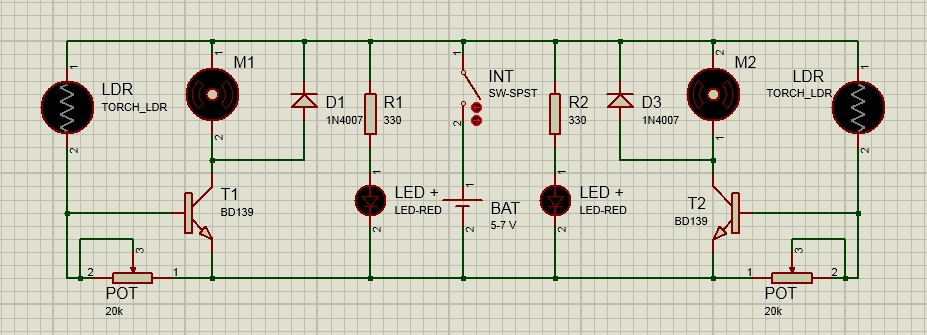
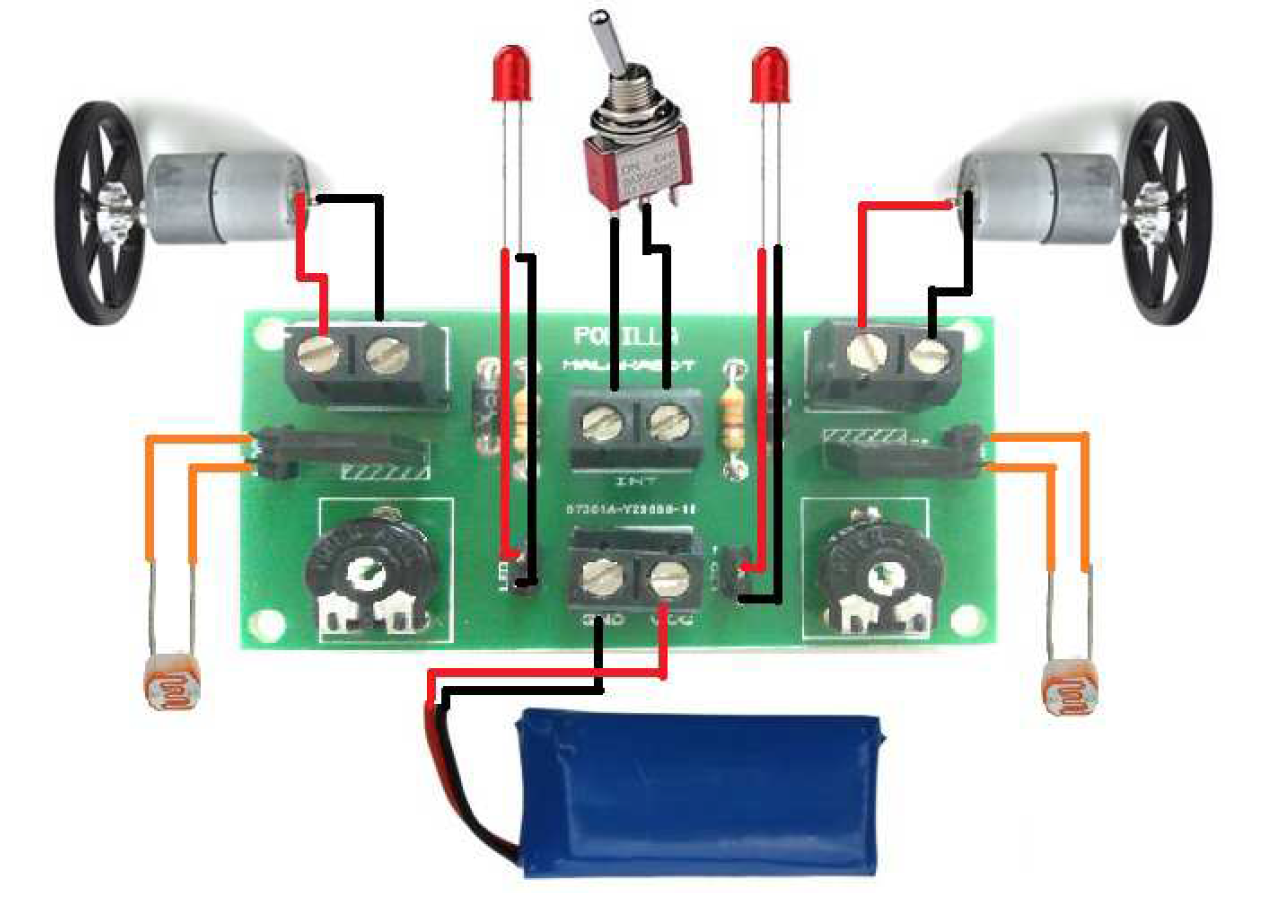
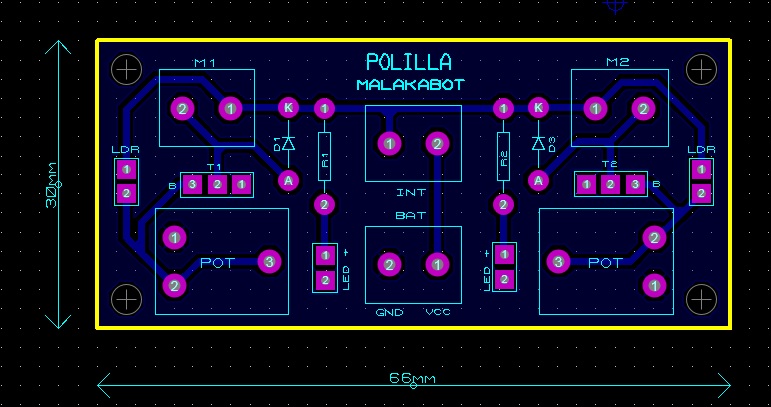
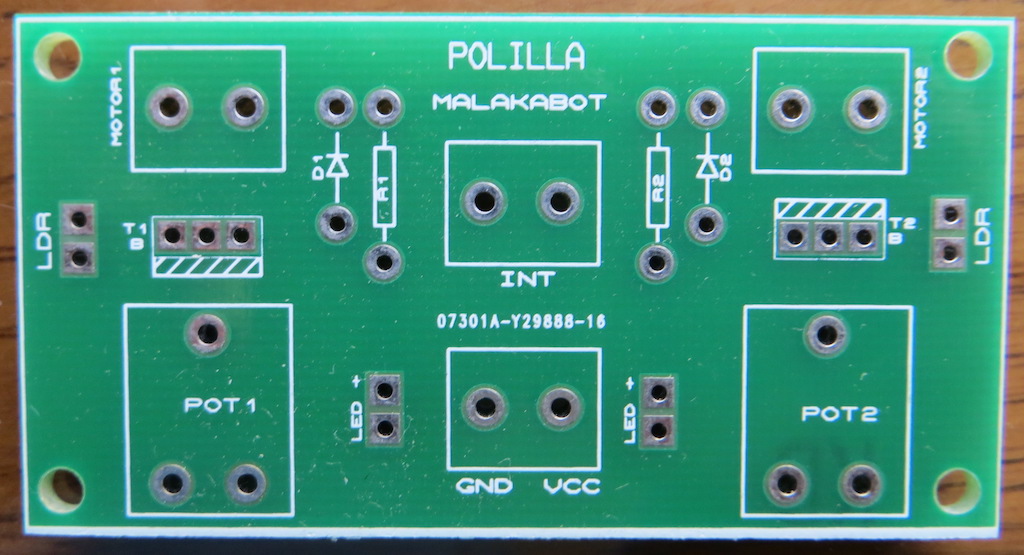
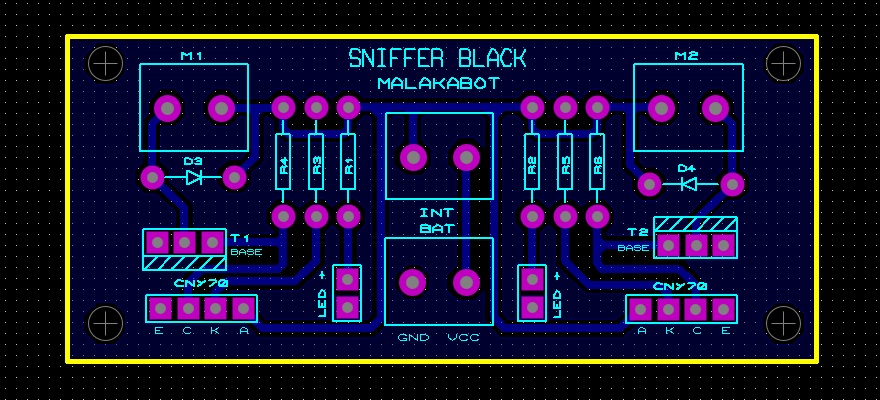
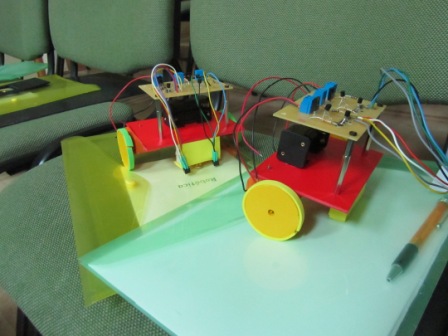
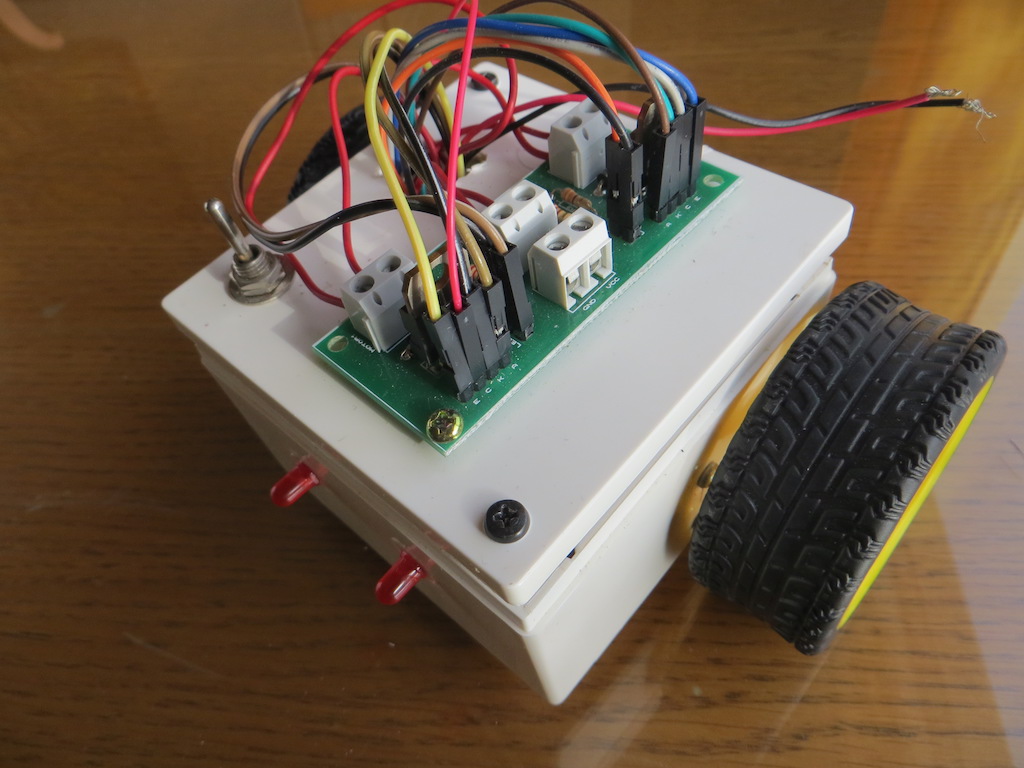
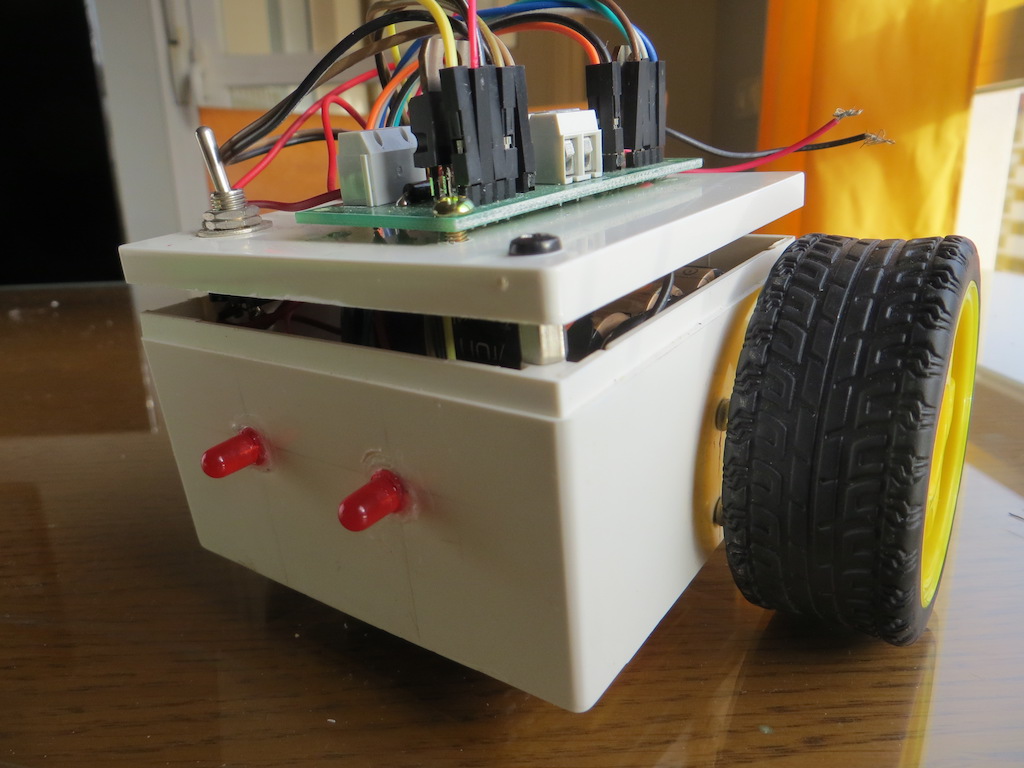
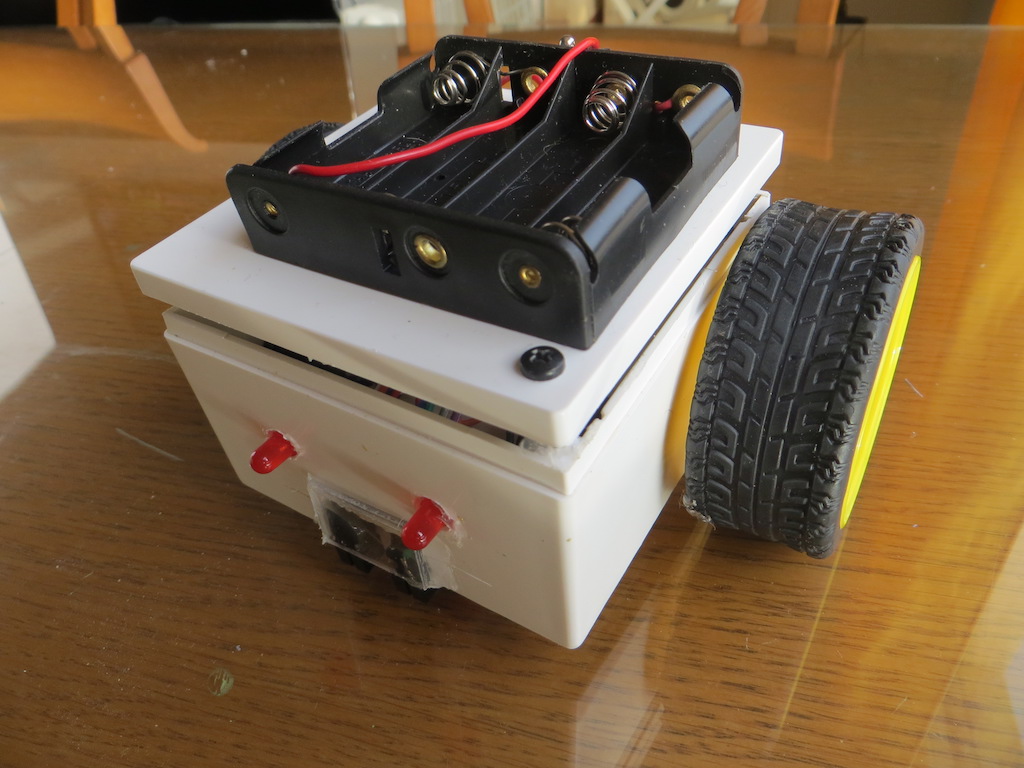
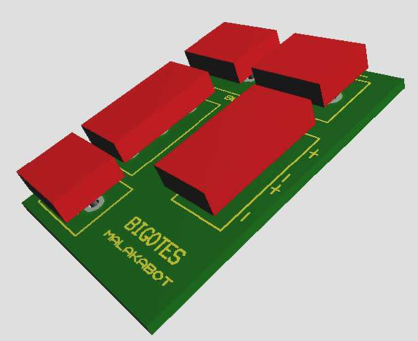
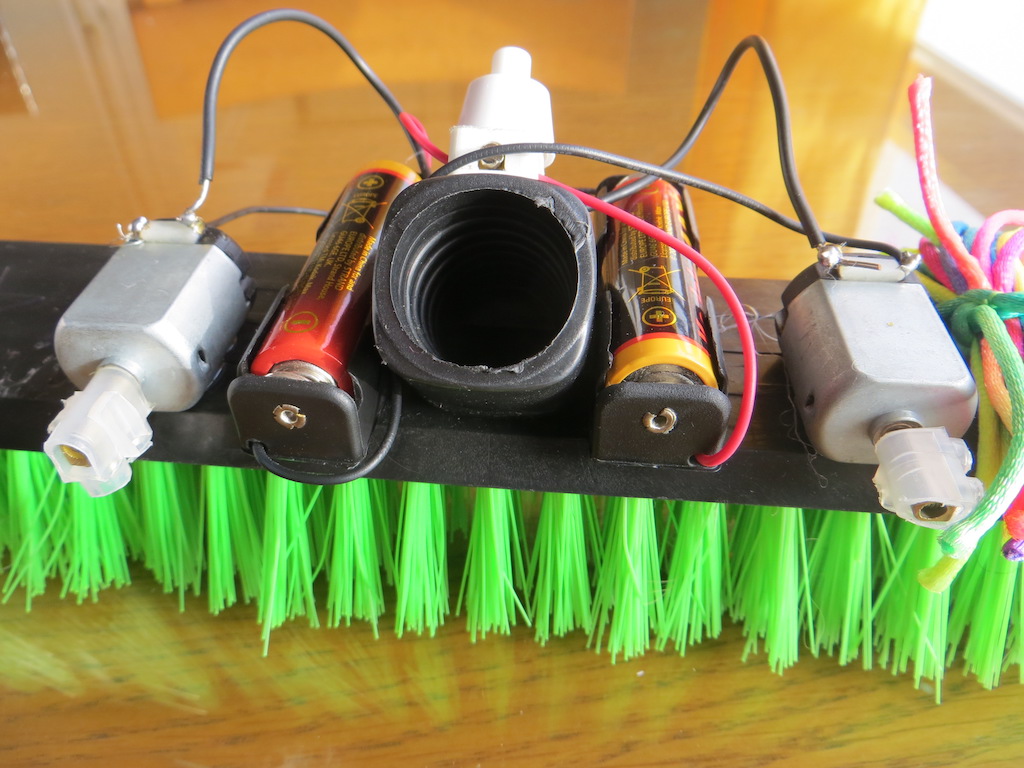
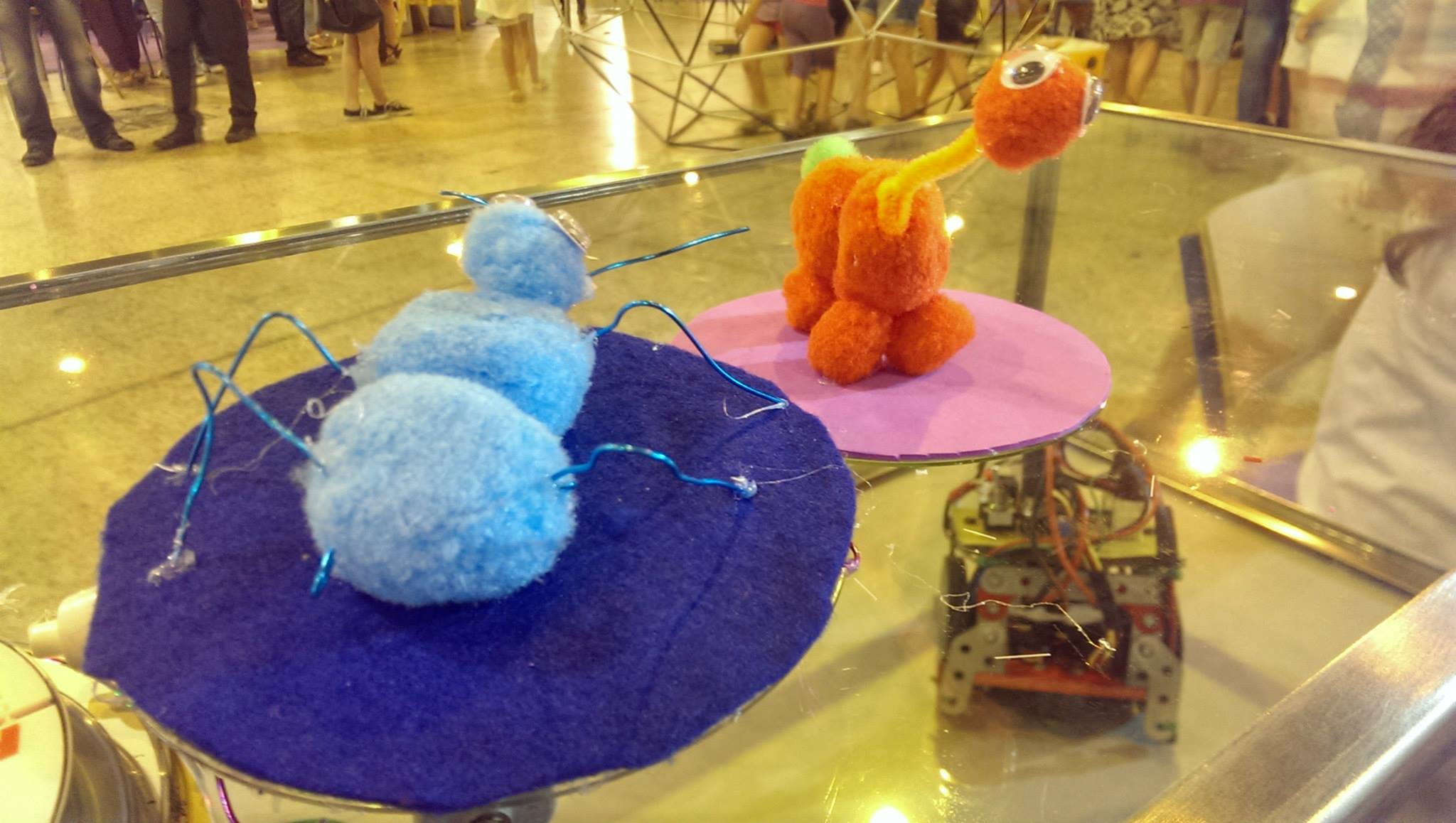
Tras el enorme éxito de los Talleres de Verano de Principia, decidimos crear nuestras propias placas de Iniciación a la Electrónica a través de la Robótica, y mandarlas a fábrica: Bigotes, Polilla, Sniffer Black y Sniffer White.
Polilla_PCB.zip Bigotes_PCB.zip SnifferBlack_PCB.zip SnifferWhite_PCB.zip
Estas placas fueron desarrolladas como Proyecto Integrado del alumno Víctor Morilla Banderas, de la última promoción del ciclo Desarrollo de Productos Electrónicos del IES Politécnico Jesús Marín. Casi todos los circuitos electrónicos están basados en prototipos del profesor José A. Cárdenas Martínez.