Estos proyectos están basados en los robots Polilla del profesor José A. Cárdenas Martínez.
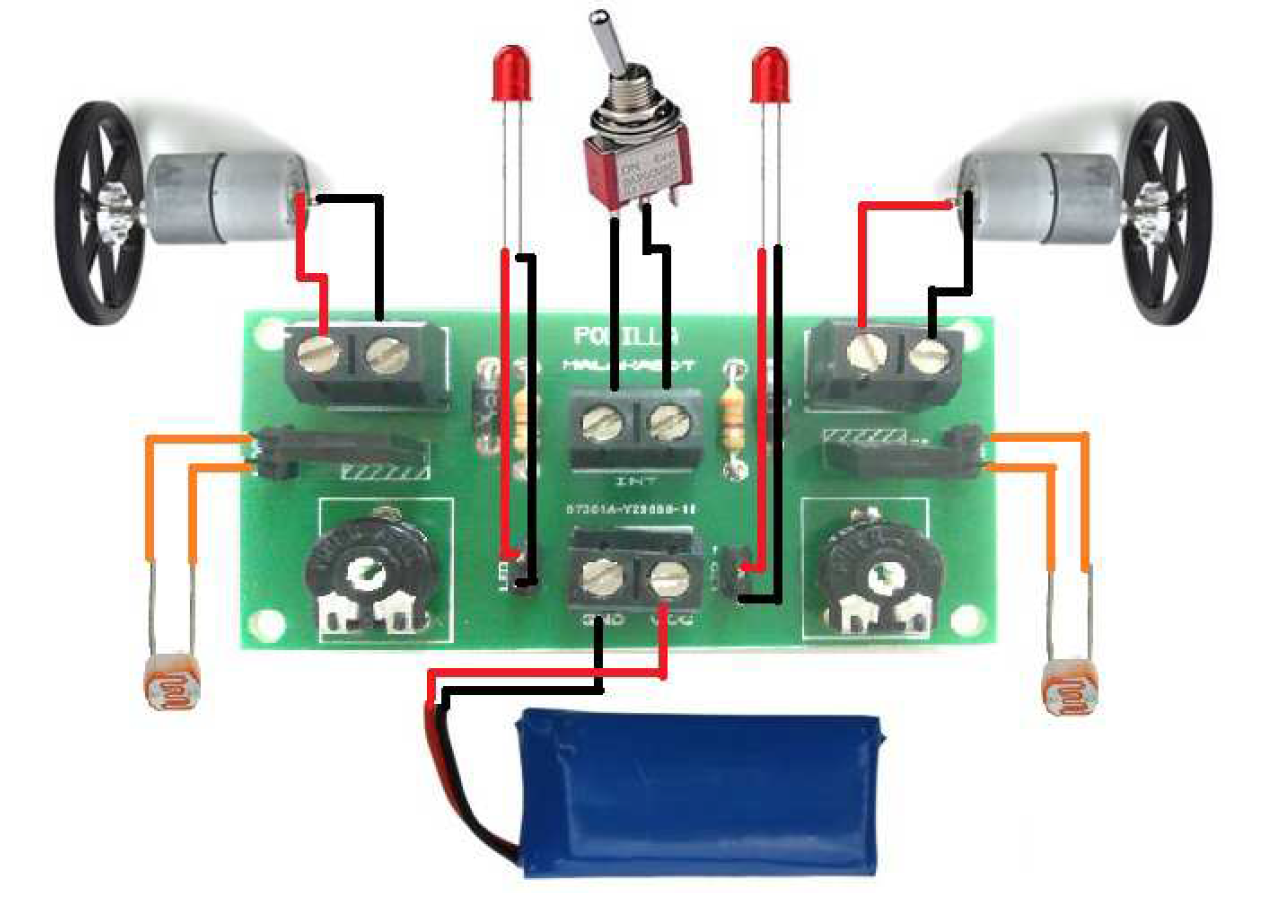
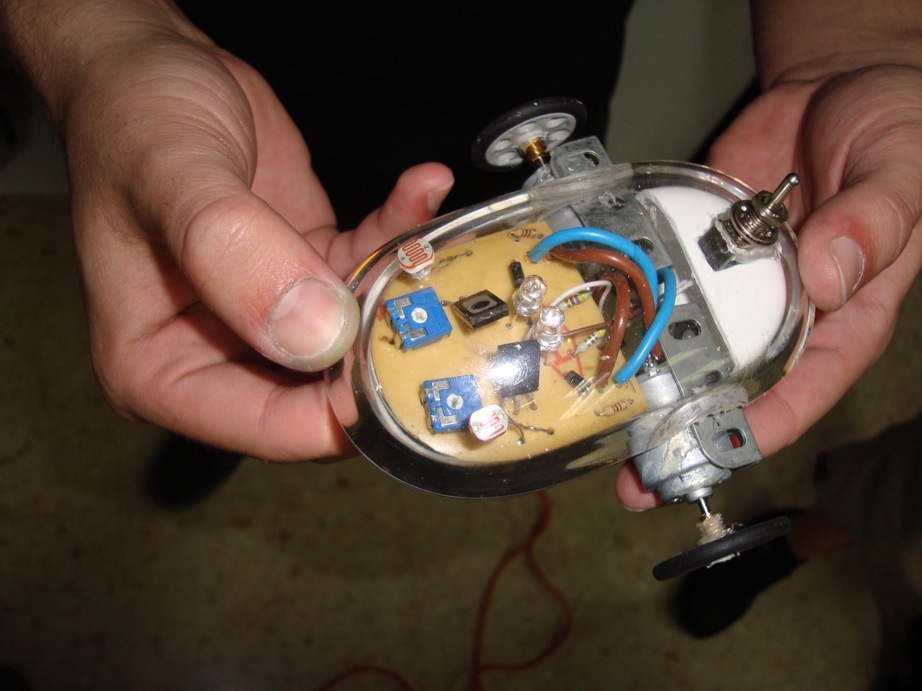
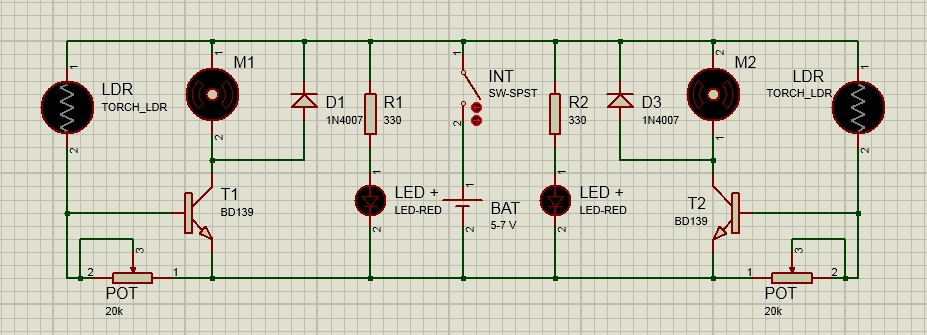
Es un circuito simétrico, con dos LDR (resistencias variable con la luz), dos transistores, dos potenciómetro y dos motores. Además, hemos añadido dos LEDs a la alimentación, y dos diodos de protección ante picos de corriente inversa. Si por ejemplo, le llega luz al LDR de la derecha, el transistor conduce corriente y mueve el motor de la izquierda. Si no llega luz, el transistor no conduce y el motor no se mueve.
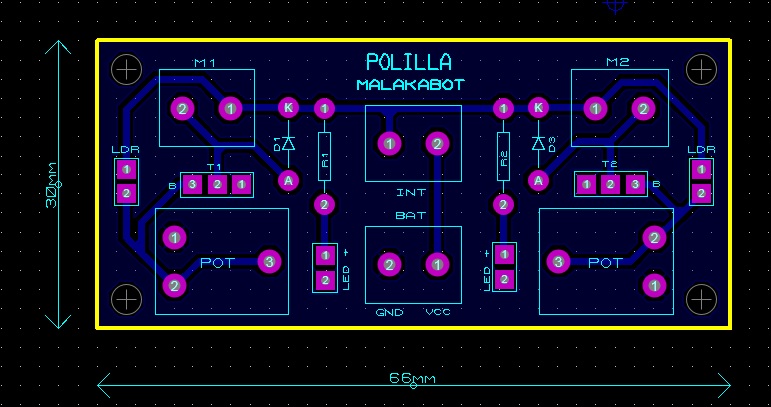
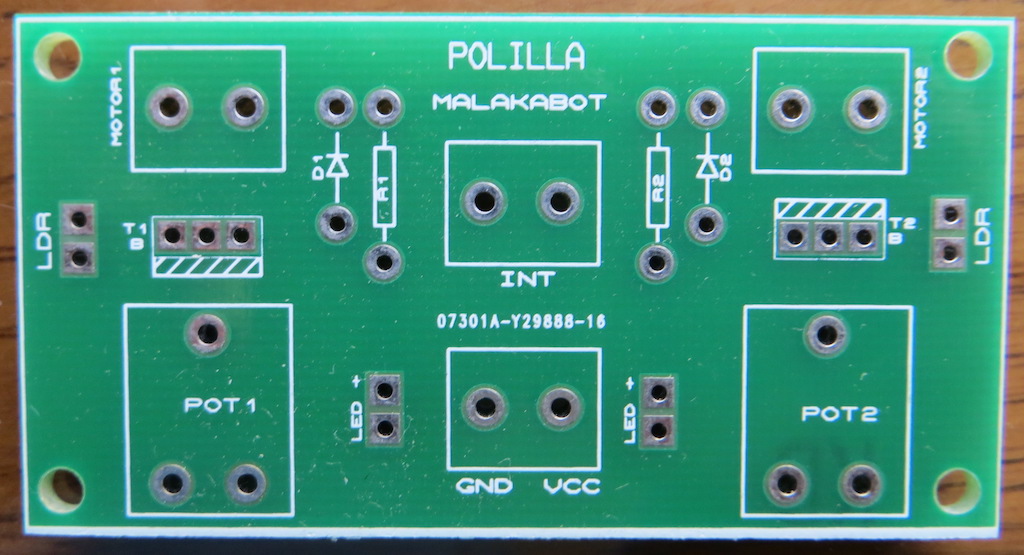
Para la PCB se ha intentado mantener la disposición del esquema electrónico con fines didácticos.