Magnífico reportaje realizado por los alumnos de Imagen y Sonido del IES Politécnico Jesús Marín.
Autor: admin
Malakabot 2015 – Carreras Pro
Comentarios de Raúl Lapeira, de la Liga Nacional de Robótica de Competición.
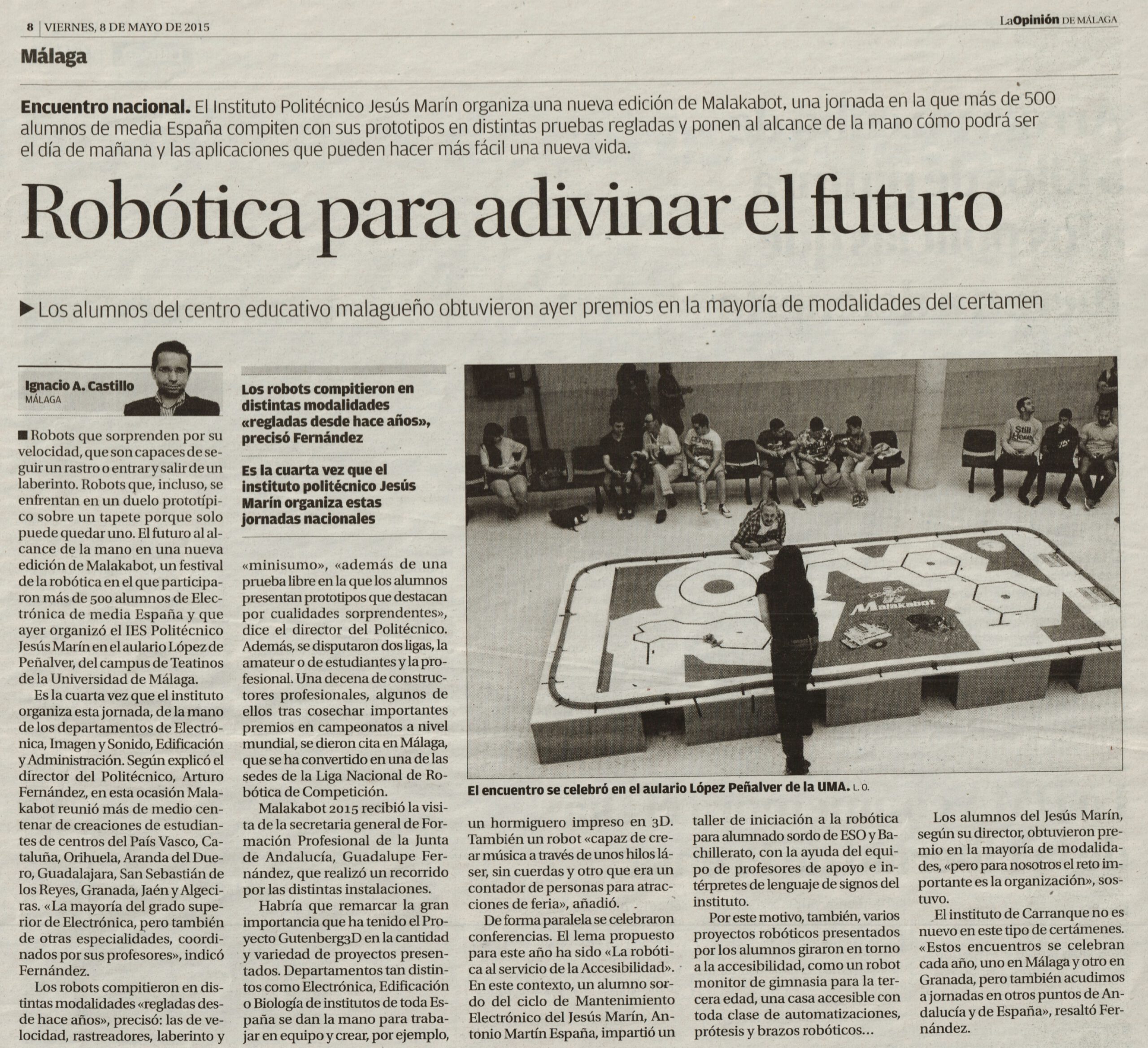
Malakabot 2015 – prensa



Malakabot 2015 – Ponencias
Hormiguero colaborativo impreso en 3D.
Ponente: Ángeles Murcia Aniorte (IES El Palmeral, Orihuela).
Música + TIC: Un mundo de posibilidades de creación, entretenimiento y aprendizaje.
Ponente: Isabel Barbancho Pérez (Dpto. Ingeniería de Comunicaciones, ETSI de Telecomunicación).
Esculturas interactivas. El uso de la Electrónica en el Arte.
Ponente: Juan Carlos Sánchez Duque (IES Torreón del Alcázar, Ciudad Real).
¿En qué me beneficia el hardware libre?
Ponente: David Martín Peral (Trastejant, Madrid).
Trabajo por retos con imagina3Dbot-arduino-app inventor: una propuesta para Primaria, ESO y CCFF.
Ponente: Antoni Moreno Rey (Robolot, IES La Garrotxa, Olot).
Nuevos escenarios educativos.
Ponente: Mª Pilar González (IES Virgen de las Nieves, Granada).
OptoPi: Sistema operativo de Raspberry Pi para control de Impresoras 3D.
Ponente: Gerardo González Cordero (IES Virgen de las Nieves, Granada).
NAO, la plataforma más completa y avanzada para la Educación.
Ponente: NAO, Lucía Rojas Huertas (Juguetrónica).
Mecánica de robots de competición desde el Ciclo de Automoción.
Ponente: Sergio Llopis Martín (Equipo K2-Robotics, VeloWii , Valencia).
Iniciación a la Electrónica a través de Arduino.
Ponente: Ana Esquiva Peña (IES Politécnico Jesús Marín, Málaga).
Robótica y Accesibilidad.
Ponente: Joaquín Ballesteros Gómez (Dpto. Tecnología Electrónica, ETSI de Telecomunicación).
Eraikizpi, una impresora de resina creada gracias a la comunidad y al conocimiento colectivo.
Ponente: Koldo Artola (Domotek).
Drones imprimibles.
Ponentes: Gaizka Castelruiz Picabea y Asier Durán Mugabure (IEFPS Don Bosco, Rentería).
Escáner Ciclop.
Ponentes: Daniel Aparicio Collazo y Iker Valero Aldaz (IEFPS Don Bosco, Rentería).
«Enabling the future», prótesis con impresoras 3D.
Ponentes:
IES Virgen de las Nieves (Granada): Mª Pilar González (profesora), Elisabel Álvarez, Rodrigo Espadafor, Mª Carmen Martín y Joaquín Hidalgo.
IEFPS Don Bosco (Rentería): Carlos Lizarbe (profesor), Sergio Hurtado, Josu Gutierrez, Jon Ander Mateos y Kevin Caballero.
Robótica en el Museo Jorge Rando 2015
Charla-coloquio acerca de la Robótica, en el Museo Jorge Rando de Málaga, organizado por la Cátedra UNESCO de Comunicación, y presentado por Bernardo Díaz Nosty, dentro del ciclo de debates «Lo que está pasando» (mayo-2015).
Intervienen Cristina Urdiales y Enrique Norro.
En esta primera parte queda resumida a grandes rasgos la Historia de la Robótica a través de sus distintas definiciones.
En esta segunda parte se propone un futuro de la Robótica, consecuencia de la Sociedad del Conocimiento.
IES Politécnico Jesús Marín visita el CEIP Domingo Lozano
La última semana de marzo 2015 el CEIP Domingo Lozano celebró la semana de la luz. Y por allí nos pasamos con nuestros circuitos Polilla y un poco de imaginación…
Iniciación a la Electrónica a través de la Robótica
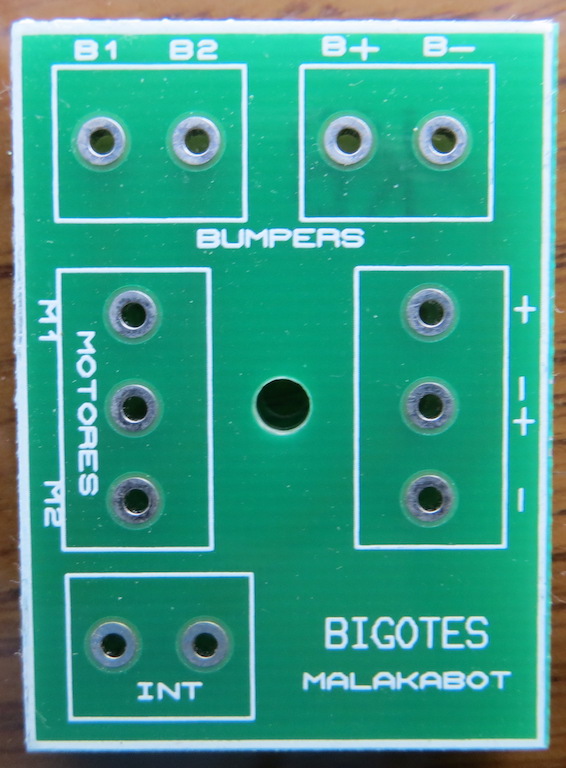
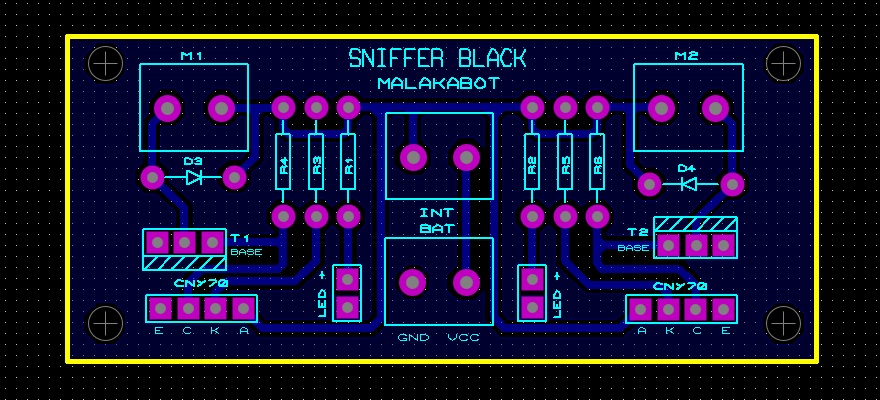
Tras el enorme éxito de los Talleres de Verano de Principia, decidimos crear nuestras propias placas de Iniciación a la Electrónica a través de la Robótica, y mandarlas a fábrica: Bigotes, Polilla, Sniffer Black y Sniffer White.
Polilla_PCB.zip Bigotes_PCB.zip SnifferBlack_PCB.zip SnifferWhite_PCB.zip
Estas placas fueron desarrolladas como Proyecto Integrado del alumno Víctor Morilla Banderas, de la última promoción del ciclo Desarrollo de Productos Electrónicos del IES Politécnico Jesús Marín. Casi todos los circuitos electrónicos están basados en prototipos del profesor José A. Cárdenas Martínez.
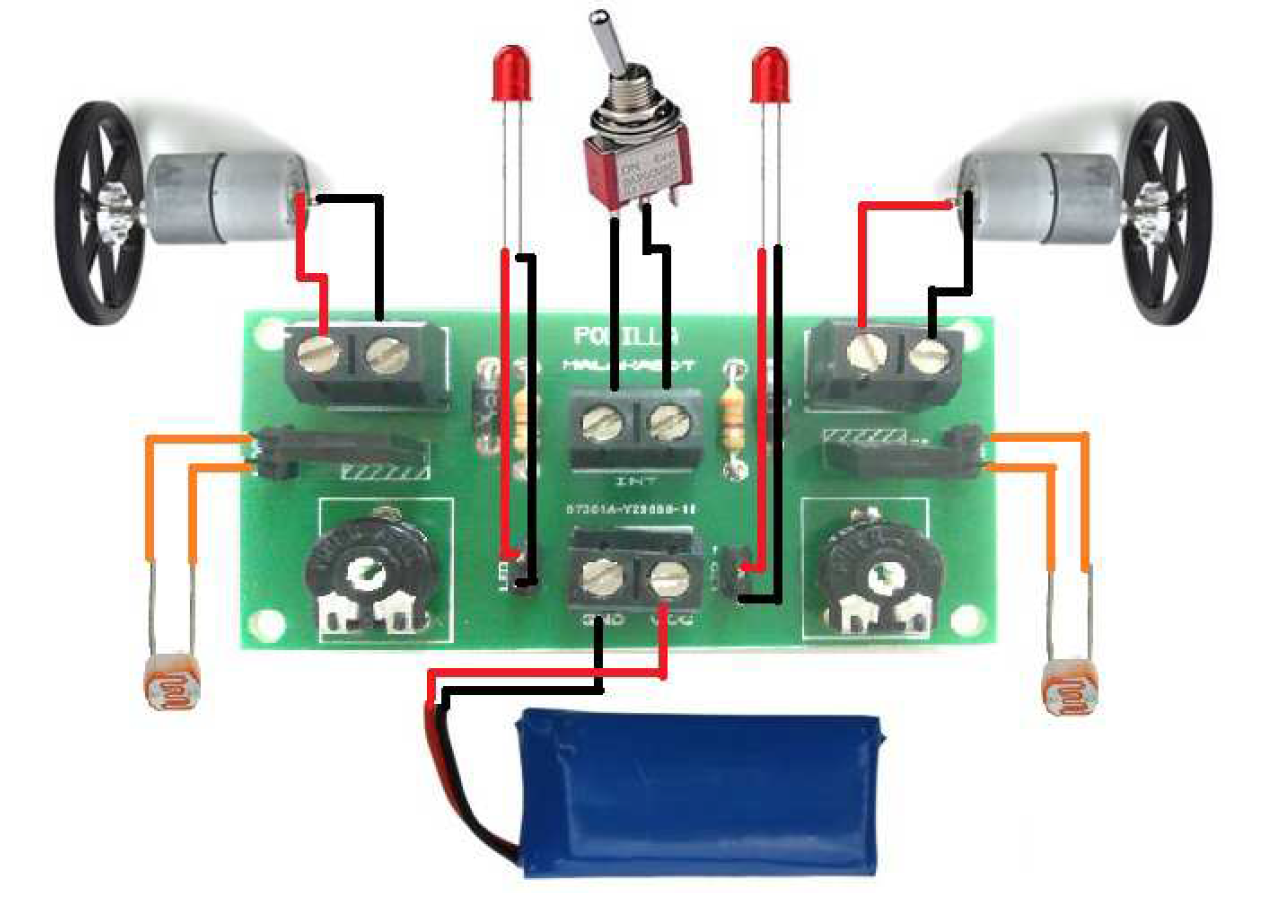
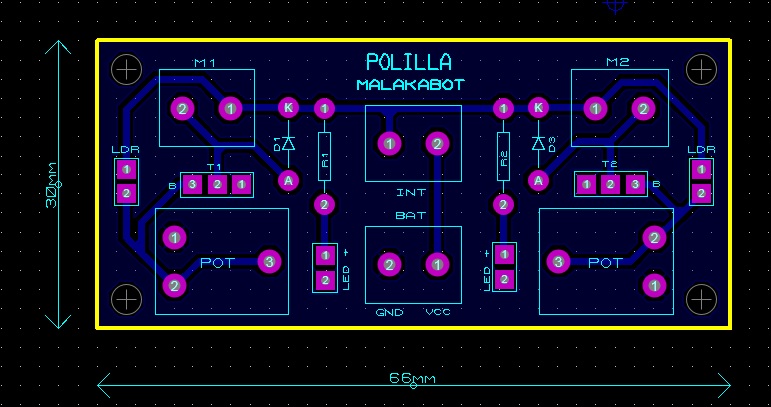
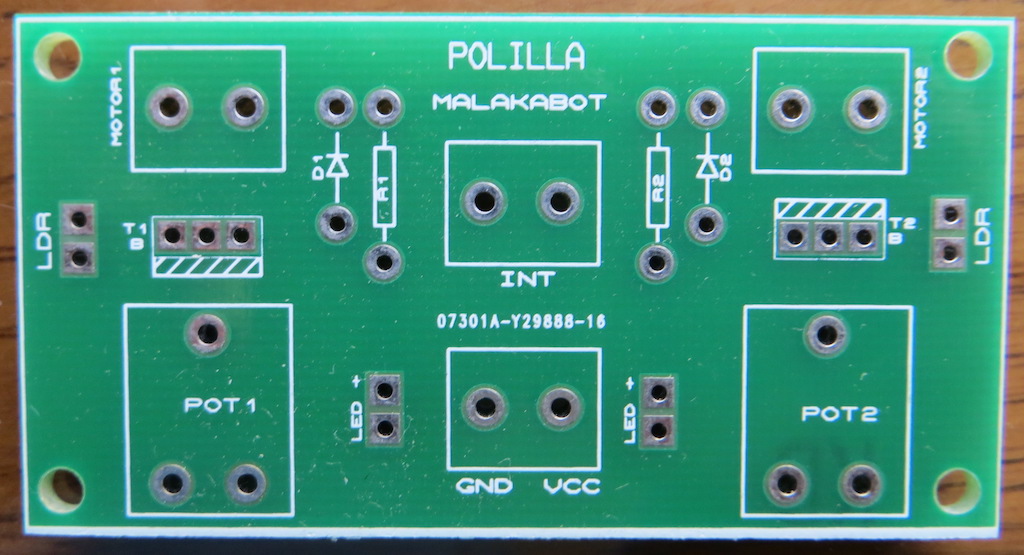
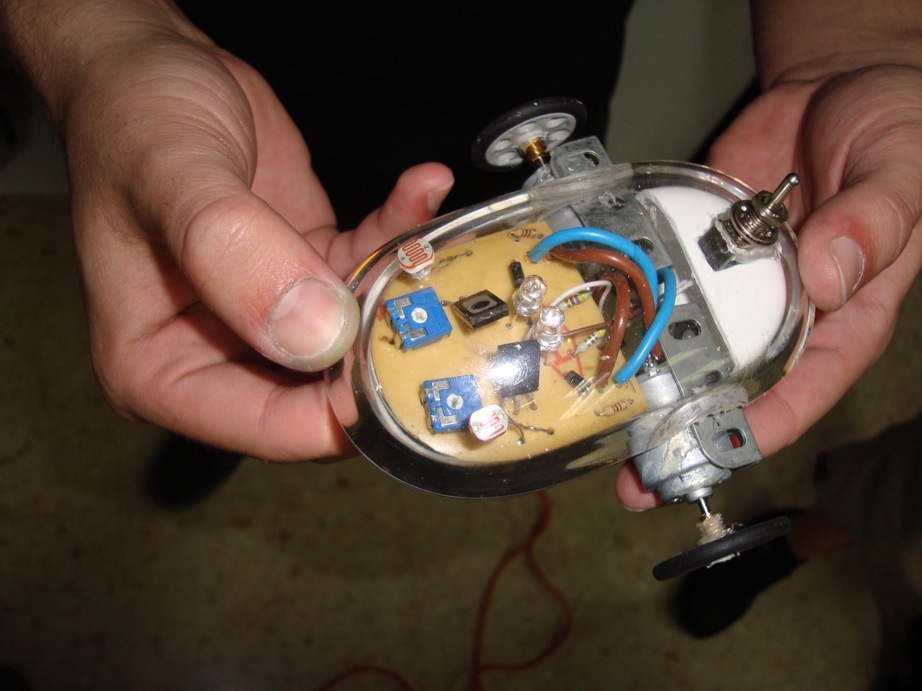
Polilla
Estos proyectos están basados en los robots Polilla del profesor José A. Cárdenas Martínez.
Es un circuito simétrico, con dos LDR (resistencias variable con la luz), dos transistores, dos potenciómetro y dos motores. Además, hemos añadido dos LEDs a la alimentación, y dos diodos de protección ante picos de corriente inversa. Si por ejemplo, le llega luz al LDR de la derecha, el transistor conduce corriente y mueve el motor de la izquierda. Si no llega luz, el transistor no conduce y el motor no se mueve.
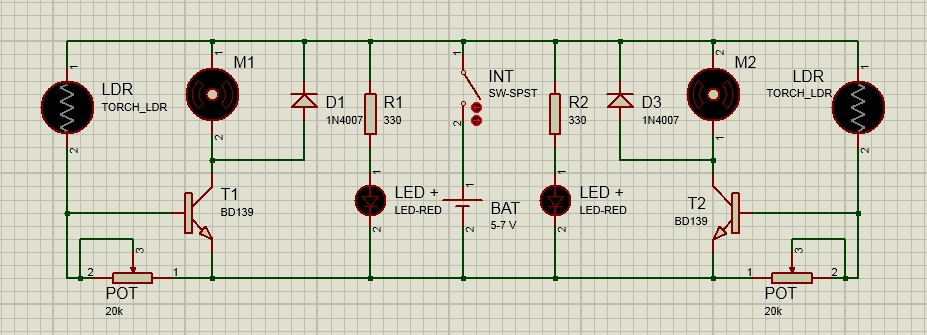
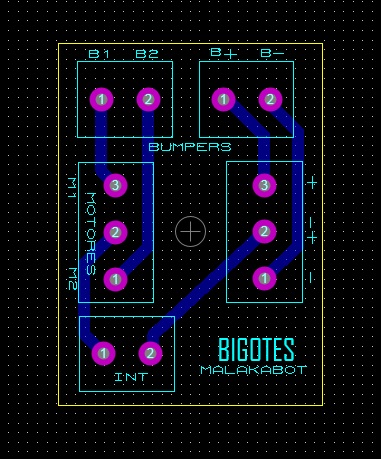
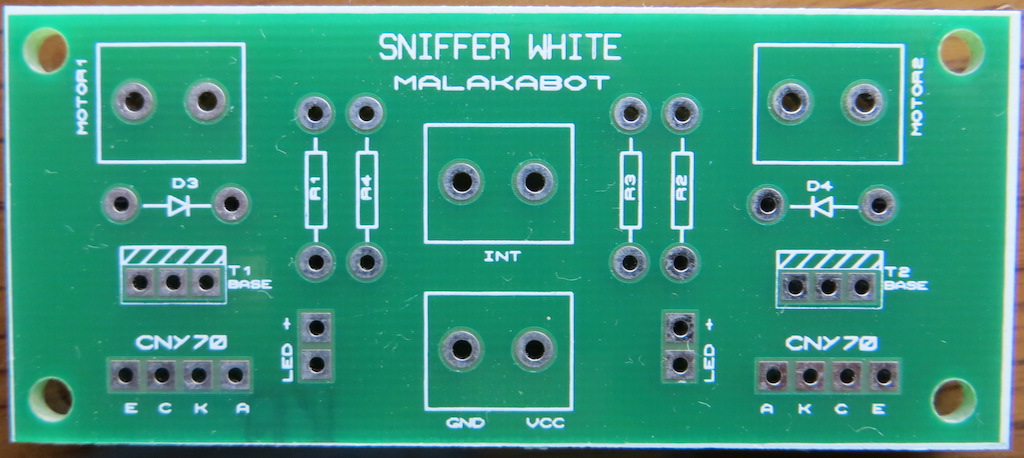
Para la PCB se ha intentado mantener la disposición del esquema electrónico con fines didácticos.








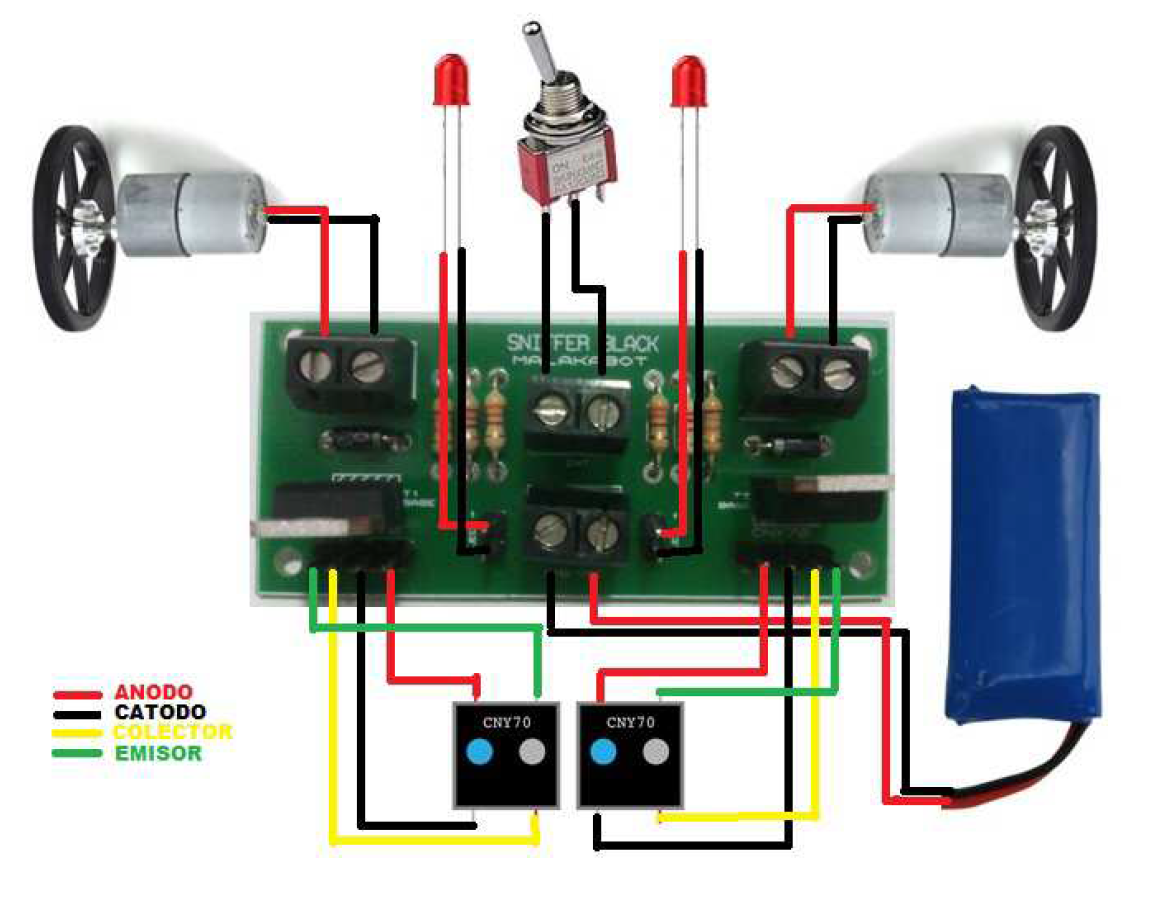
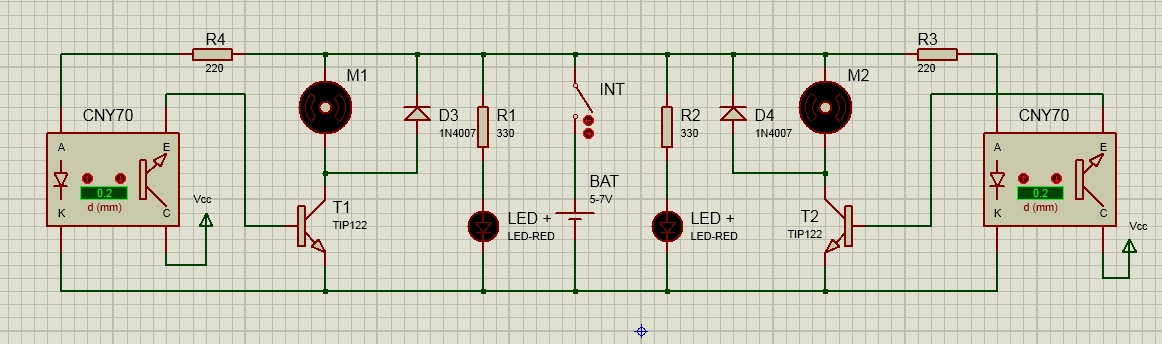
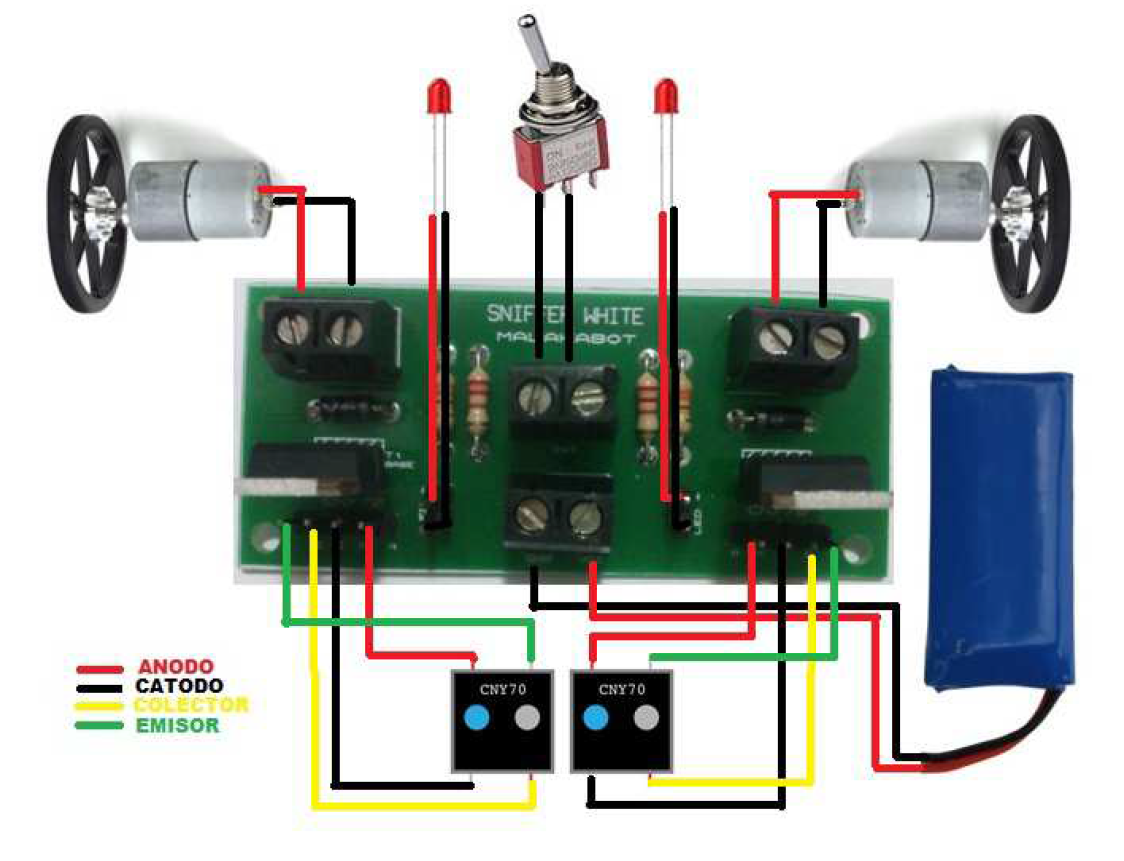
Sniffer Black & White
Es un robot siguelíneas sin microcontrolador. Con dos CNY70, y dos transistores que mueven los dos motores respectivamente.
Sniffer Black sigue una línea negra sobre fondo blanco, y se recomienda poner los dos CNY70 bastante juntos, dentro del ancho de la línea. Si por ejemplo, al llegar a una curva, el CNY70 de la izquierda se sale de la línea, el transistor de la derecha dejaría de conducir, parando el motor hasta que el robot recuperase el trazado.
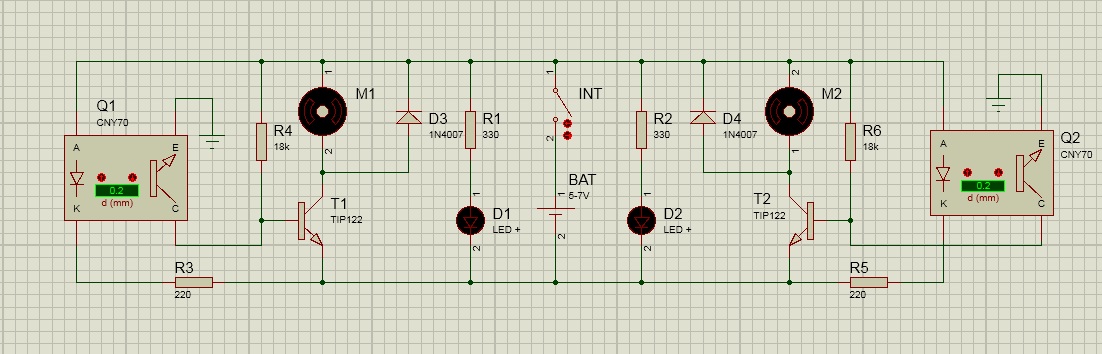
El Sniffer White está pensado para poner los dos CNY70 justo fuera del borde de la línea, es decir, leyendo el fondo blanco. Y si uno de los sensores, en una curva, entra en la línea, el transistor opuesto pararía ese motor hasta recuperar el trazado.




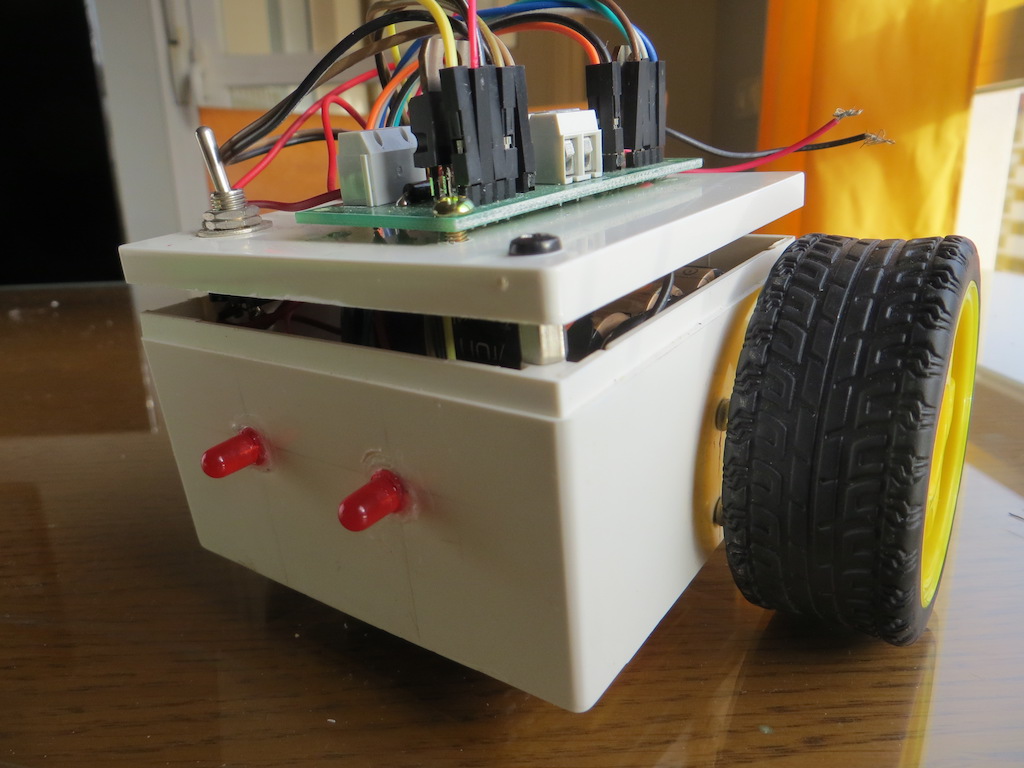

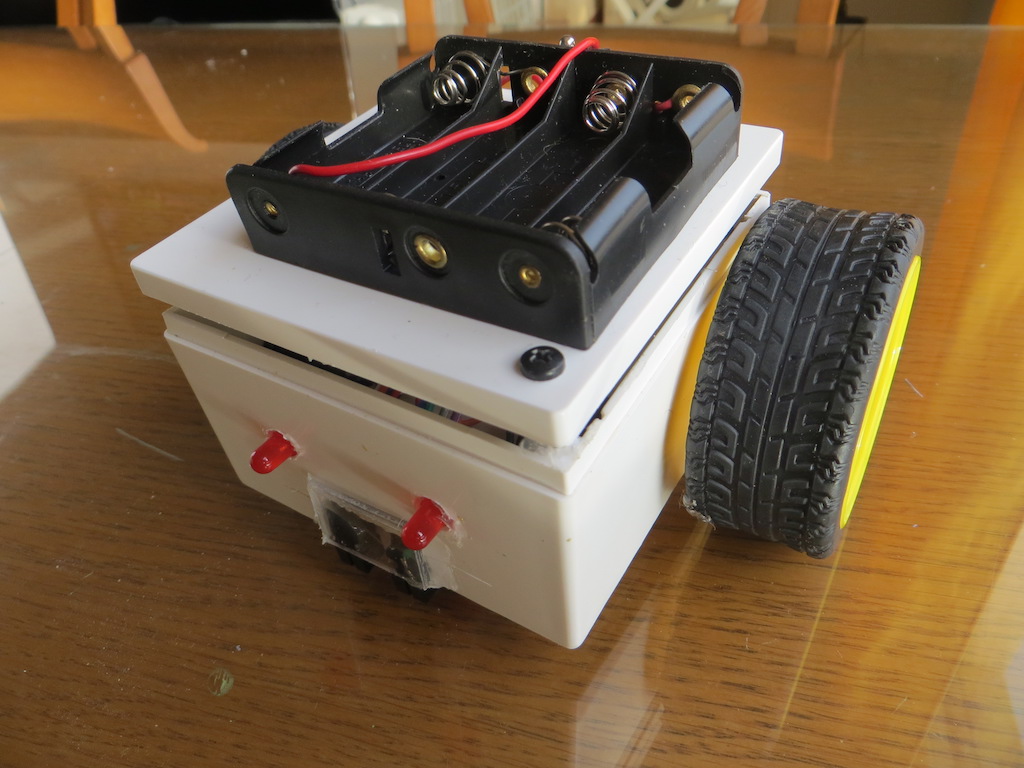
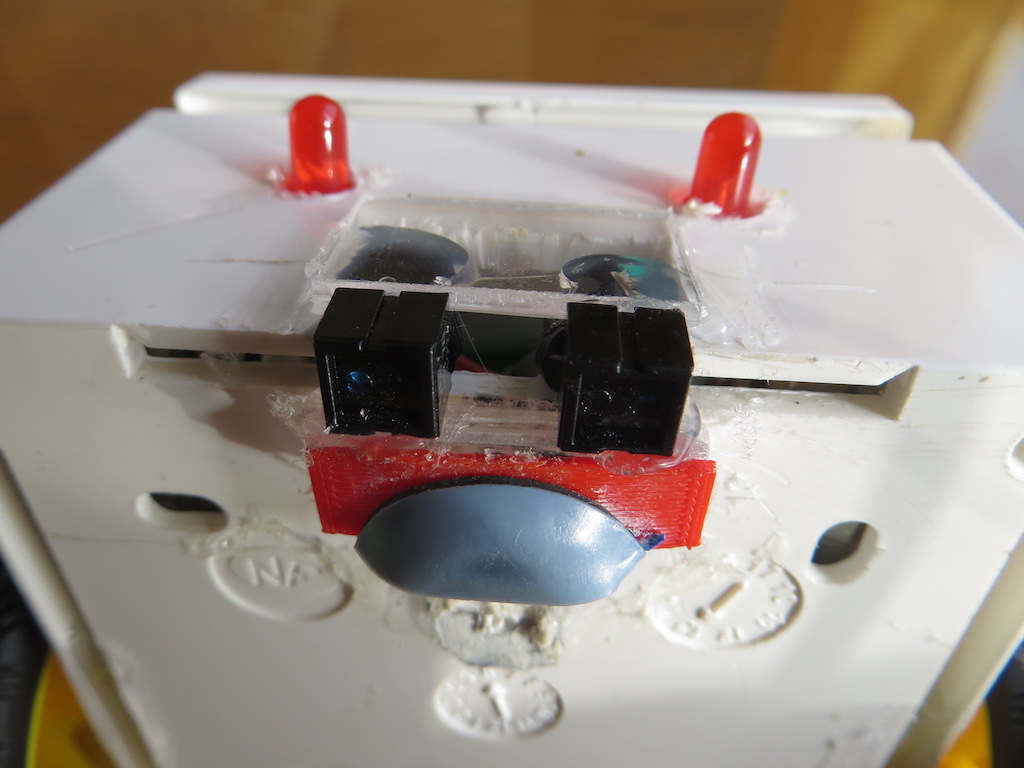
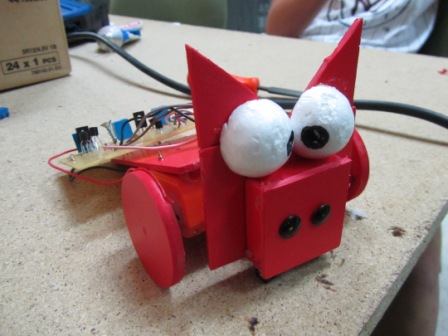
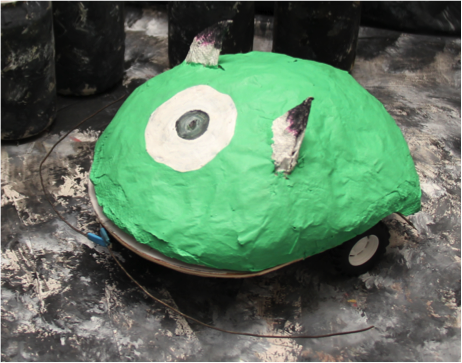
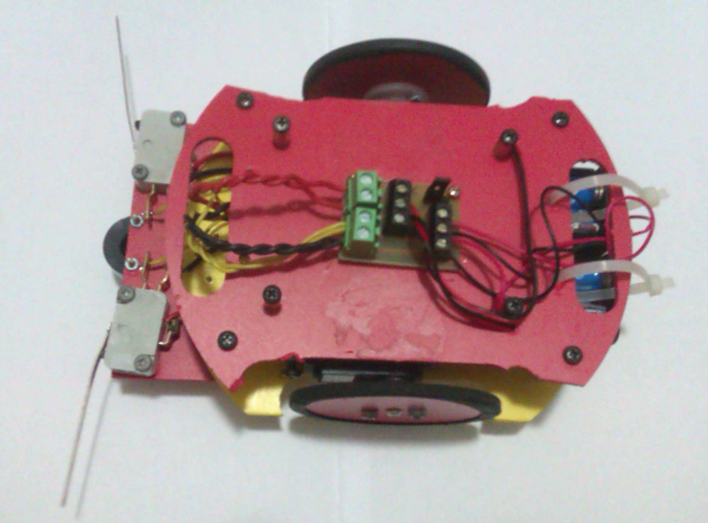
Bigotes
La electrónica de este robot está copiada de un diseño del profesor de Tecnología José Andrés Alcaraz.
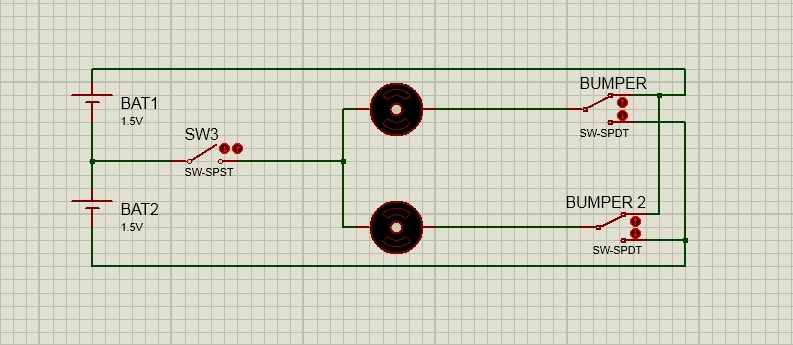
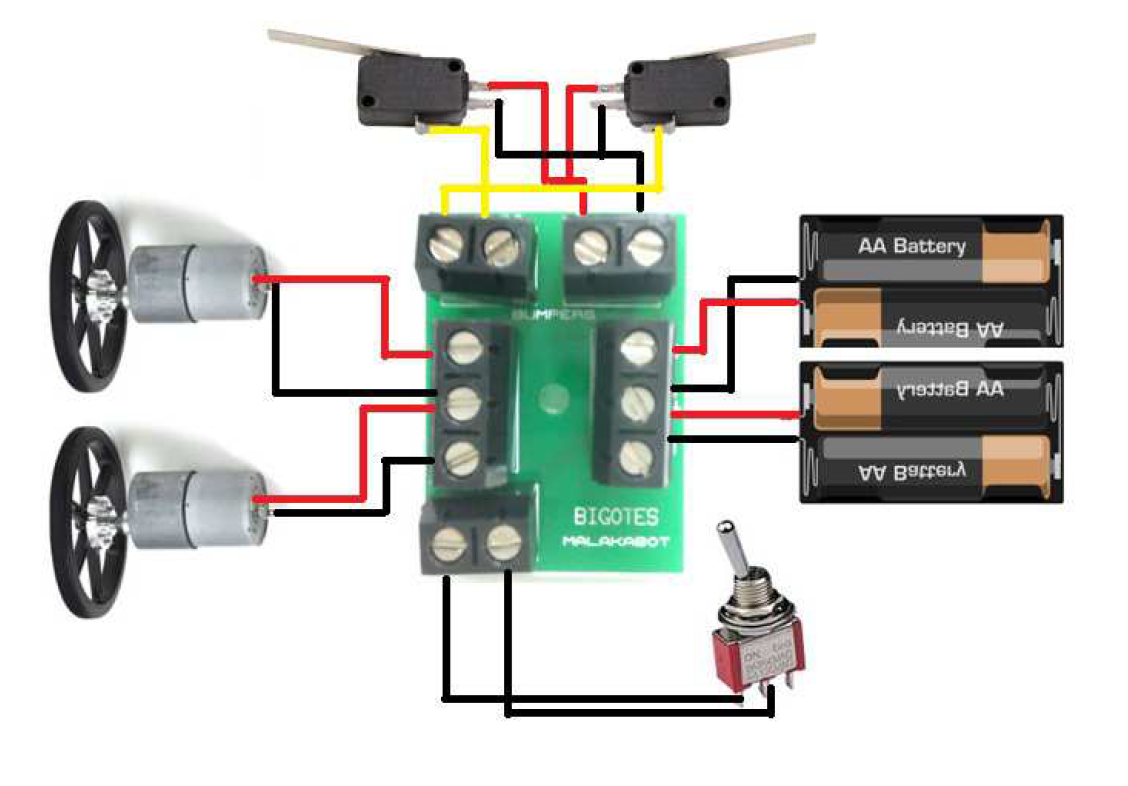
El objetivo del robot es que vaya sorteando obstáculos. Para ello usamos dos finales de carrera (bumpers) y dos motores. La idea es muy simple, los motores se mueven hacia delante, en el mismo sentido, mientras los bumpers no estén pulsados. Si por ejemplo, el bumper de la izquierda choca con algún objeto, quedaría pulsado el interruptor, y cambiaría la polaridad del motor de la derecha, girando hacia atrás, en sentido contrario.