HEXÁGONOS CINÉTICOS: VENTAJAS Y DESVENTAJAS DE LAS REDES SOCIALES
Todos los prototipos de la muestra han sido realizados por el alumnado del ciclo formativo de Mantenimiento Electrónico en colaboración con el del Bachillerato de Artes Plásticas del IES Politécnico Jesús Marín, tutorizados por los profesores Enrique Norro (Electrónica) y Encina García (Dibujo), del Colectivo El Intruso.
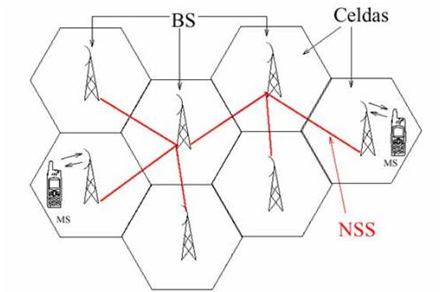
El concepto del hexágono viene del posicionamiento que toman las antenas de telefonía móvil, cuyas radiaciones conforman celdas hexagonales, que dispuestas sobre plano parecen una colmena. Esto nos lleva a plantearnos conceptos como la conectividad, la comunicación, la globalización, … y las ventajas y desventajas de las redes sociales, fundamento teórico del proyecto.
COMUNICACIÓN CON EL MUNDO / AISLAMIENTO SOCIAL
PROTOTIPO: Antonio Gómez Rodrigo. ILUSTRACIÓN: María Isabel Vera Torres.
COMUNICACIÓN INMEDIATA / INSOMNIO
PROTOTIPO: Celia María Romero Vílchez. ILUSTRACIÓN: Erika Torreblanca Moreno.
PERMITE SOCIALIZARSE / IMAGEN FALSA DE LA PERSONA
PROTOTIPO: Juan Antonio Martínez Romero. ILUSTRACIÓN: David Campoy Zhou.
APOYO DE OTRAS PERSONAS / OBSESIÓN POR EL FÍSICO
PROTOTIPO: Ángel Jesús Carvajal Martín. ILUSTRACIÓN: Indara Ortiz Gutiérrez, Luna Gallego Jurado.
OPORTUNIDADES LABORALES / ESTAFA Y ROBO DE DATOS
PROTOTIPO: Foxy Manel Tejada García, Israel Cuervo Toledo. ILUSTRACIÓN: Carmen Montes Mellado, Alex Coronado García.
ENTRETENIMIENTO / CIBERBULLYING
PROTOTIPO: Igor Dumbrava. ILUSTRACIÓN: Álvaro Mesa Cortés, Mari Carmen Alba López.
REFUERZA LA AUTOESTIMA / FALTA DE PRIVACIDAD
PROTOTIPO: Leandro Sapag Viglione. ILUSTRACIÓN: Gumi Arias Fernández.
PROTOTIPO: Jorge Trujillo Román. ILUSTRACIÓN: Jorge Martínez Lorenzo.
SENTIRSE INTEGRADO / TRANSFOBIA, HACER AMIGOS/ROBO DE IDENTIDAD
PROTOTIPO: Francisco Aragón Cortés. ILUSTRACIÓN: Begoña Morón Cambre.
INSPIRACIÓN PARA FORMARSE / ADICCIÓN AL MÓVIL
PROTOTIPO: Cristóbal Rosales Díaz. ILUSTRACIÓN: Natalia Ruíz Márquez, Alberto Bustos Rodríguez, Sandra Navas Arroyo.